Проецирование позиции людей на карту
Местоположение людей на карте определяется через пространственное преобразование координат силуэтов, полученных с одной или нескольких камер. Для этого потребуется индивидуальная калибровка каждой камеры.
Результат работы функции доступен через метод API /multistream_bodies.
Калибровка камер
Включите опцию «Отслеживание по карте» в настройках OMNI Agent и перейдите по ссылке «Калибровка камер».
Перетащите изображение карты помещения в область загрузки или загрузите ее с помощью файлового менеджера.
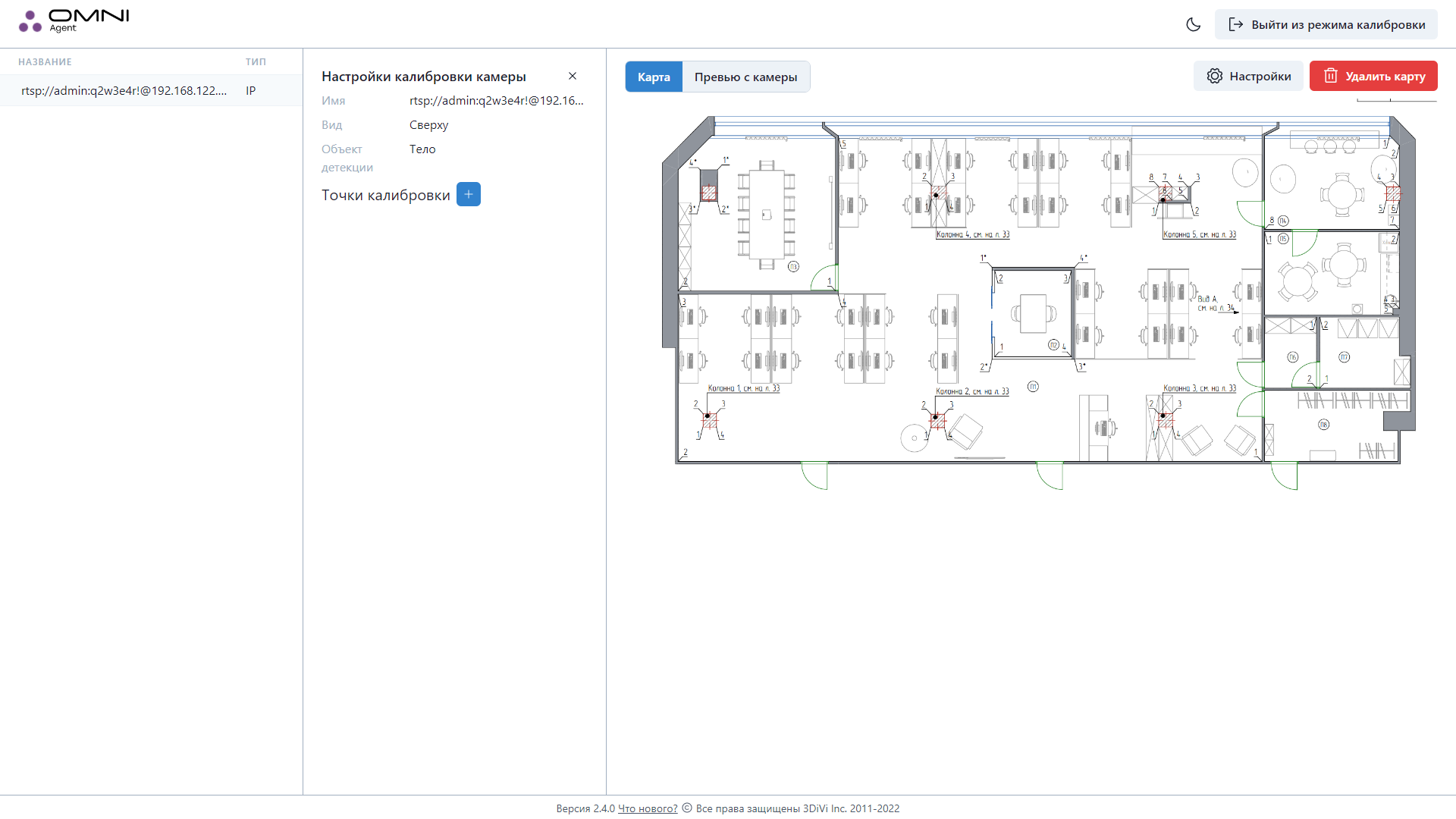
Слева выберите камеру, для которой нужно добавить калибровочные точки.
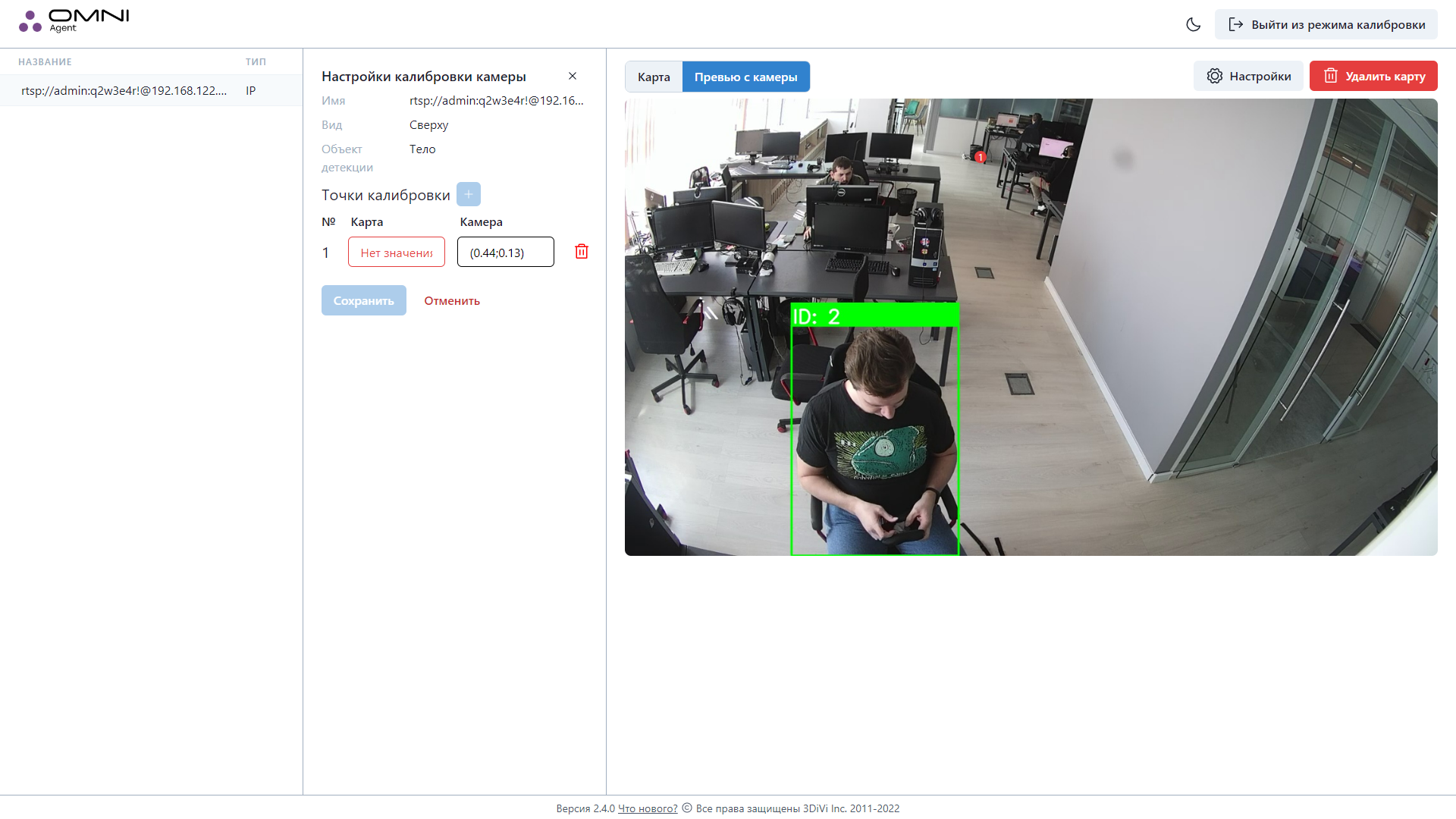
Чтобы добавить калибровочную точку, нажмите
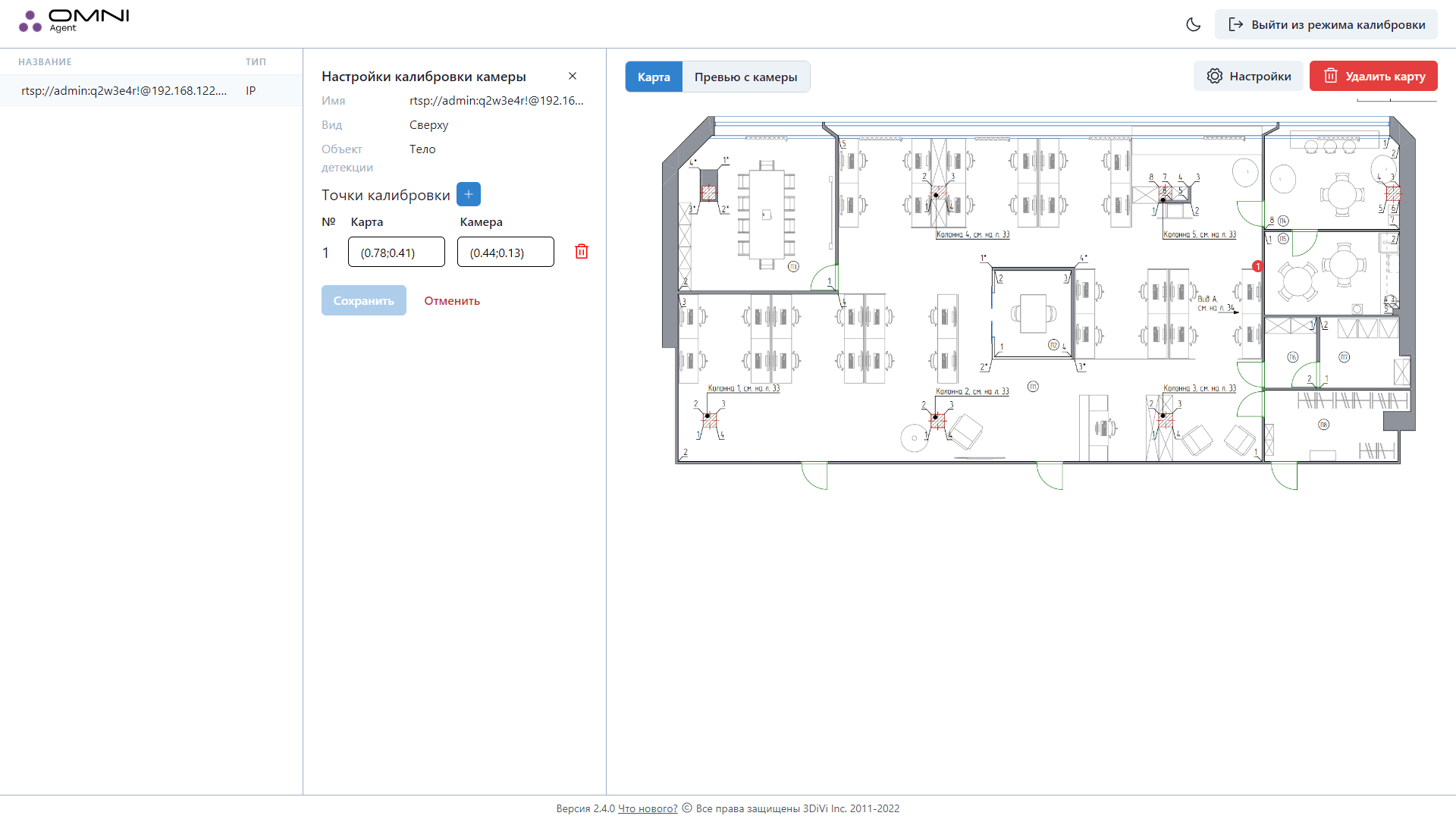
+рядом с заголовком «Точки калибровки». В результате появится строка, в которой будут фиксироваться координаты точек, отмеченных на карте и точек, отмеченных на превью с камеры.Во вкладке «Карта» кликните по месту на карте, где требуется установить калибровочную точку. Затем во вкладке «Превью с камеры» кликните на место примерного положения этой калибровочной точки на превью с камеры. В результате на изображениях с карты и превью с камеры появятся точки с одинаковым порядковым номером, координаты точек будут добавлены в таблицу.
- Если при установке точки была выбрана неправильная позиция, точку можно передвинуть (отредактировать). Просто нажмите на нее левой кнопкой мыши и, не отпуская, перетащите в другую позицию на изображении.
- Чем точнее будут совпадать точки, тем точнее будет калибровка, и тем точнее будет отображаться местоположение людей на карте.
- Калибровочные точки на изображении с камеры должны размещаться на полу помещения. В качестве калибровочных точек рекомендуется выбирать элементы статических объектов, таких как углы комнат и колонн или дверные проемы.
- Расположение калибровочных точек должно максимально покрывать видимую камерой поверхность пола помещения. Если точки расположены кучно или на одной прямой, качество калибровки будет низким.
После добавления четвертой пары точек нажмите Сохранить.
Чтобы вернуться к просмотру карты, закройте вкладку «Настройки калибровки камеры».
На карте помещения должны отображаться детекции со всех откалиброванных камер.

Чтобы изменить значения для порога достоверного обнаружения и порога расстояния для слияния объектов, перейдите в Настройки и укажите значения в открывшемся окне.
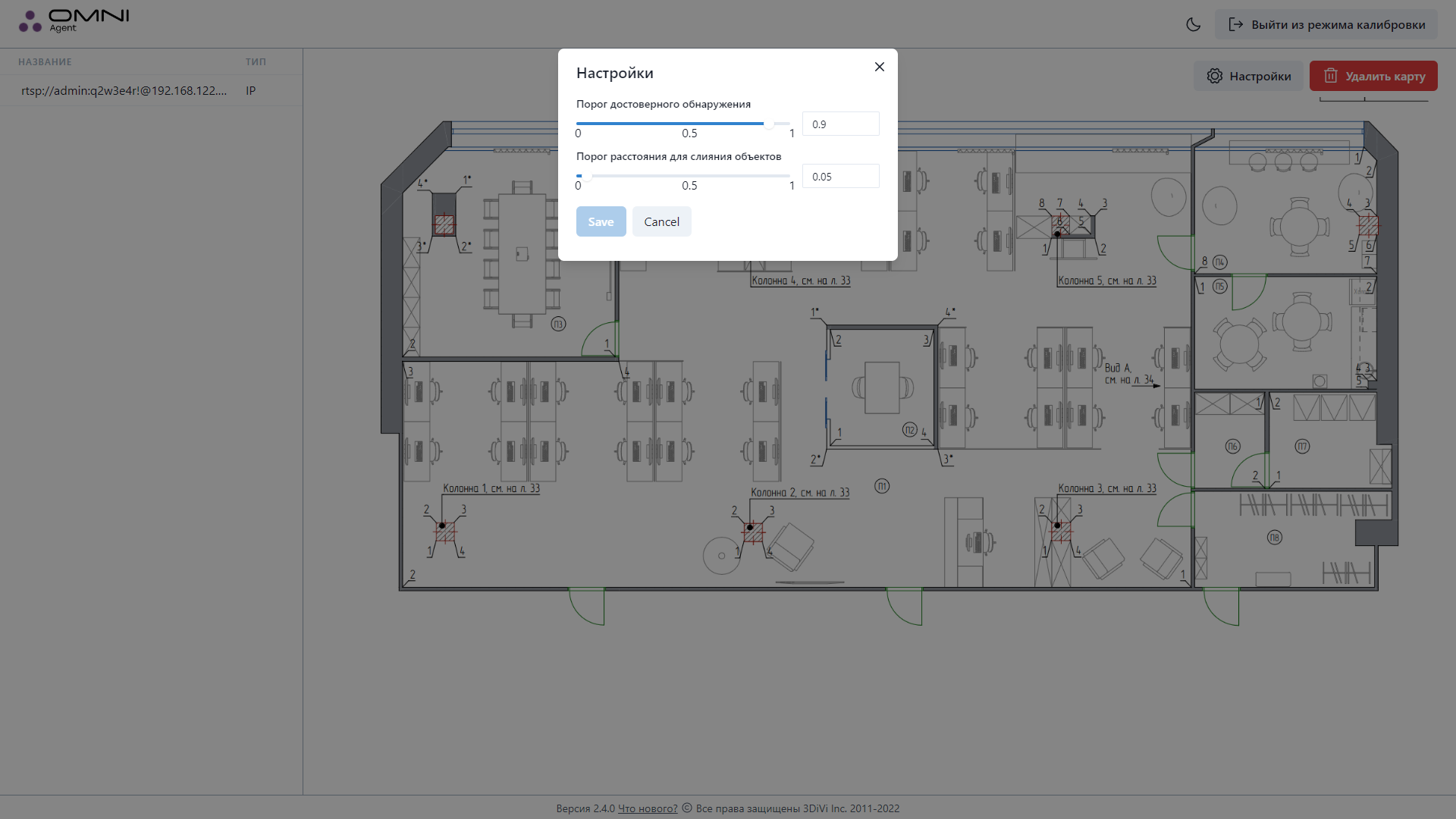
- Порог достоверного обнаружения (Confidence Detection Threshold): число от 0 до 1, показывает степень уверенности в том, что bbox содержит тело человека.
- Порог расстояния для слияния объектов (Merge Object Distance Threshold): число от 0 до 1. Все детекции в указанном радиусе склеиваются в одну, т.к. считается, что они принадлежат одному человеку.