Installation and activation
Preparation
Windows
- Before installing OMNI Agent on Windows you might need to install Microsoft Visual C++ Redistributable for Visual Studio.
- Make sure your Windows username contains only ASCII characters (Latin letters, digits, and punctuation marks).
Linux
- Set up the execution permission for the installer before running:
- Go to the directory, where OMNI Agent installer is downloaded to, and click the right button on the installation file.
- Open Properties, go to the Permission tab, and check Allow execute checkbox.
Installation
Installation with GUI
Download OMNI Agent installer from the distribution kit.
Once the downloading is completed, run the OMNI Agent installer and follow the installation wizard's instructions.
Installation without GUI (only for Linux/Windows x86_64)
Install the following GUI libraries:
sudo apt update && sudo apt install libxrender1 libx11-xcb-dev libxkbcommon-x11-0 libfontconfig1 fontconfig libfontconfig1-dev
Download the OMNI Agent installer from the distribution kit.
Run the installer.
Windows:
InstallOMNIAgent.exe installThe command is launched from the console as administrator.
Linux:
sudo -E ./InstallOMNIAgent installIf you receive any warnings / errors that mention the Desktop folder, ignore them (type
Ignore).For additional information, pass the
--helpflag.
Extract the distribution ZIP archive into the user's working directory.
Launch using the run.sh script.
Activation
Run OMNI Agent.
In the “Server Selection” window, specify the server domain and click
Next. For local deployment, the domain is specified in theingress.rules.gateway.hostfield of the platform.values.yaml file from OMNI Platform distribution — the data collection server for OMNI Agent. To work with OMNI Agent in the cloud, specify the domainhttps://cloud.3divi.ai/.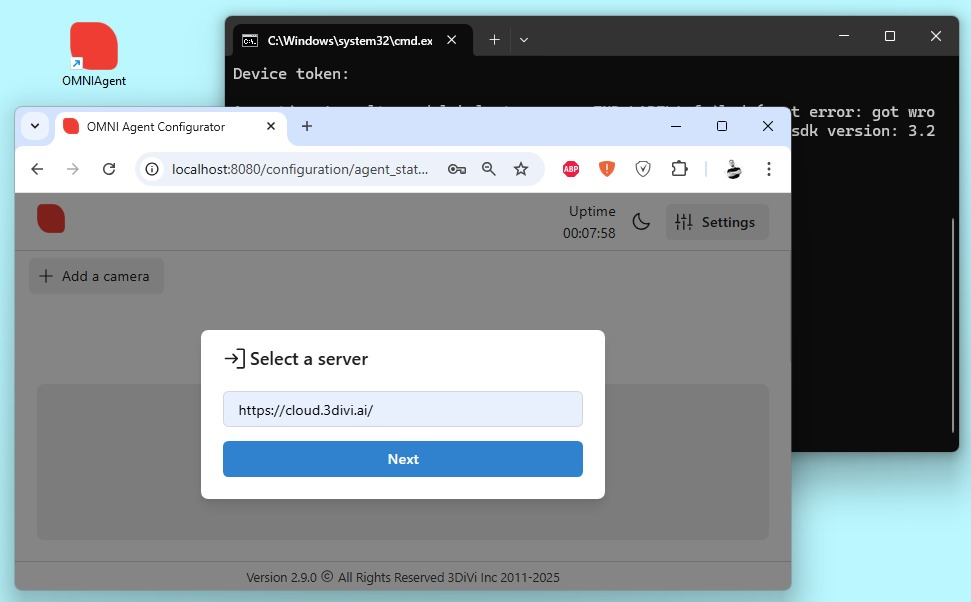
Log in to OMNI Agent. The login credentials (email and password) are specified in OMNI Platform configuration file ./cfg/platform.secrets.json under the variables
platform-user-secret.default_emailandplatform-user-secret.default_password.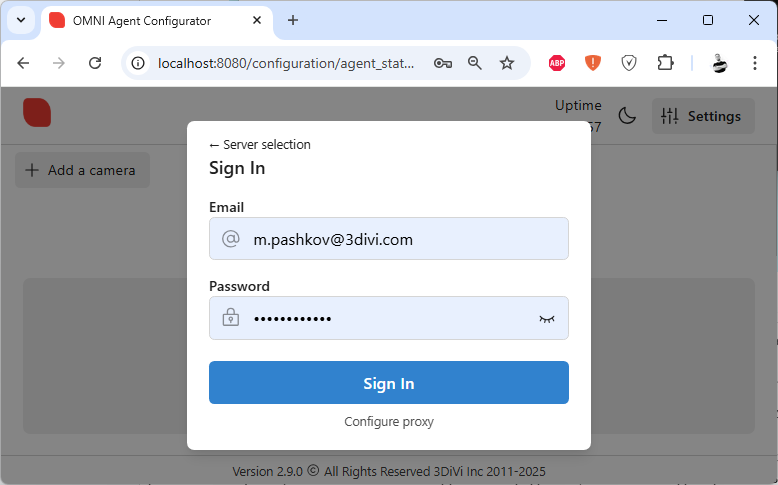
This will take you to the main page of OMNI Agent web interface.
Do not open multiple OMNI Agent tabs in the same browser simultaneously. This may cause a conflict, preventing OMNI Agent from correctly determining which tab to receive input data from.
Configure OMNI Agent as a Linux / Windows service
After installation, you can configure OMNI Agent to operate as the OS service. This will ensure that OMNI Agent starts up automatically when the OS starts, and runs in the background.
Linux
Close the terminal with OMNI Agent.
Enable autorun of OMNI Agent when the OS starts.
sudo systemctl enable OMNIAgent.serviceStart OMNI Agent in service mode.
sudo systemctl start OMNIAgent.serviceCheck OMNI Agent status.
sudo systemctl status OMNIAgent.service
Windows
Close the terminal with OMNI Agent.
Open Windows Task Manager -> Services -> OMNIAgent.
Right-click on the OMNIAgent service, select Properties -> General -> Startup Type -> Automatic.
Click Apply.
Deletion
To delete OMNI Agent, execute the commands below:
Linux
sudo systemctl stop OMNIAgent.service
sudo systemctl status OMNIAgent.service
sudo systemctl disable OMNIAgent.service
sudo /opt/OMNIAgent/uninstall purge
Windows
Run the UninstallOMNIAgent shortcut from the desktop or execute the following command in the command prompt:
C:\Program Files\OMNIAgent\uninstall purge