Map tracking
The tracking result is available through the API method /multistream_bodies.
Camera calibration
Enable the "Map Tracking" option in OMNI Agent Settings and follow the "Calibration cameras" link.
Drag and drop the map image or upload it using the file manager.
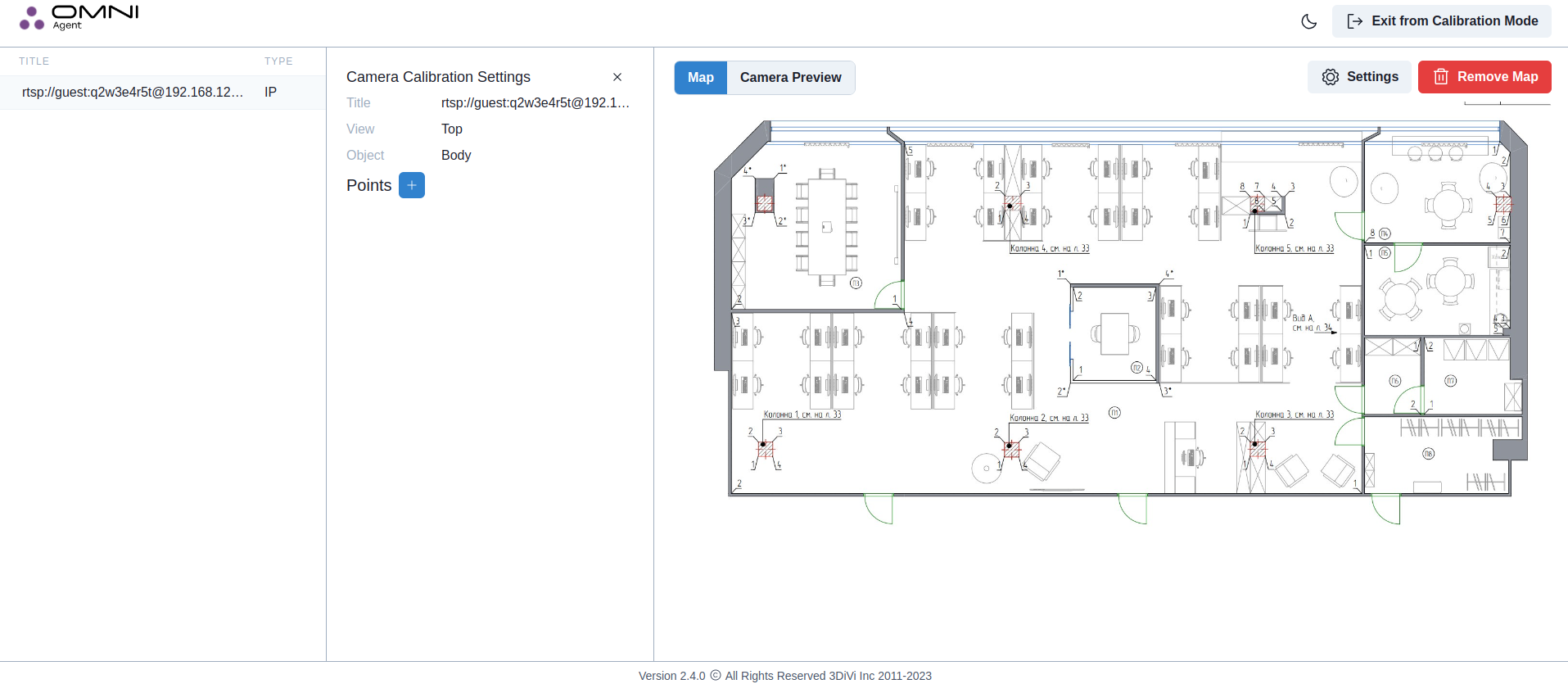
Select the camera for which you'll add the calibration points on the left.
To add a calibration point, click the
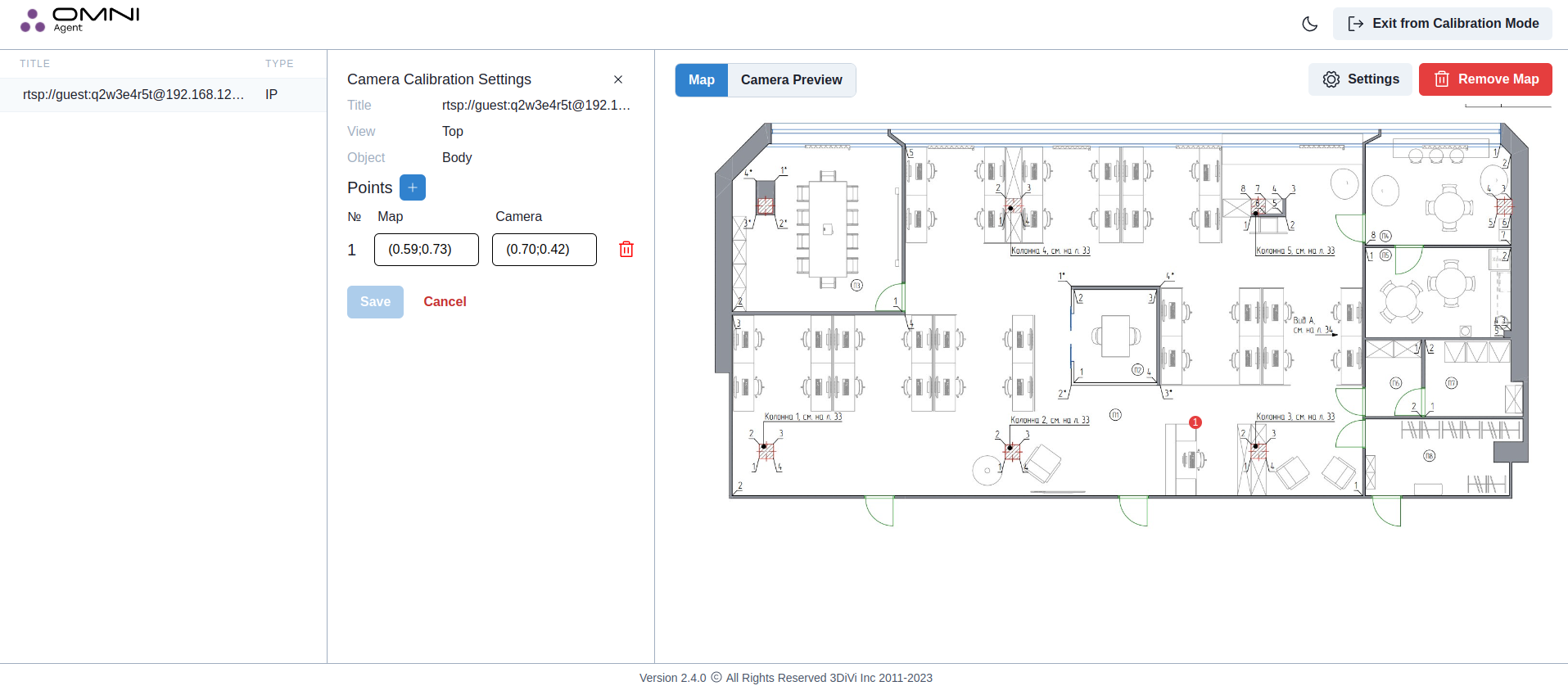
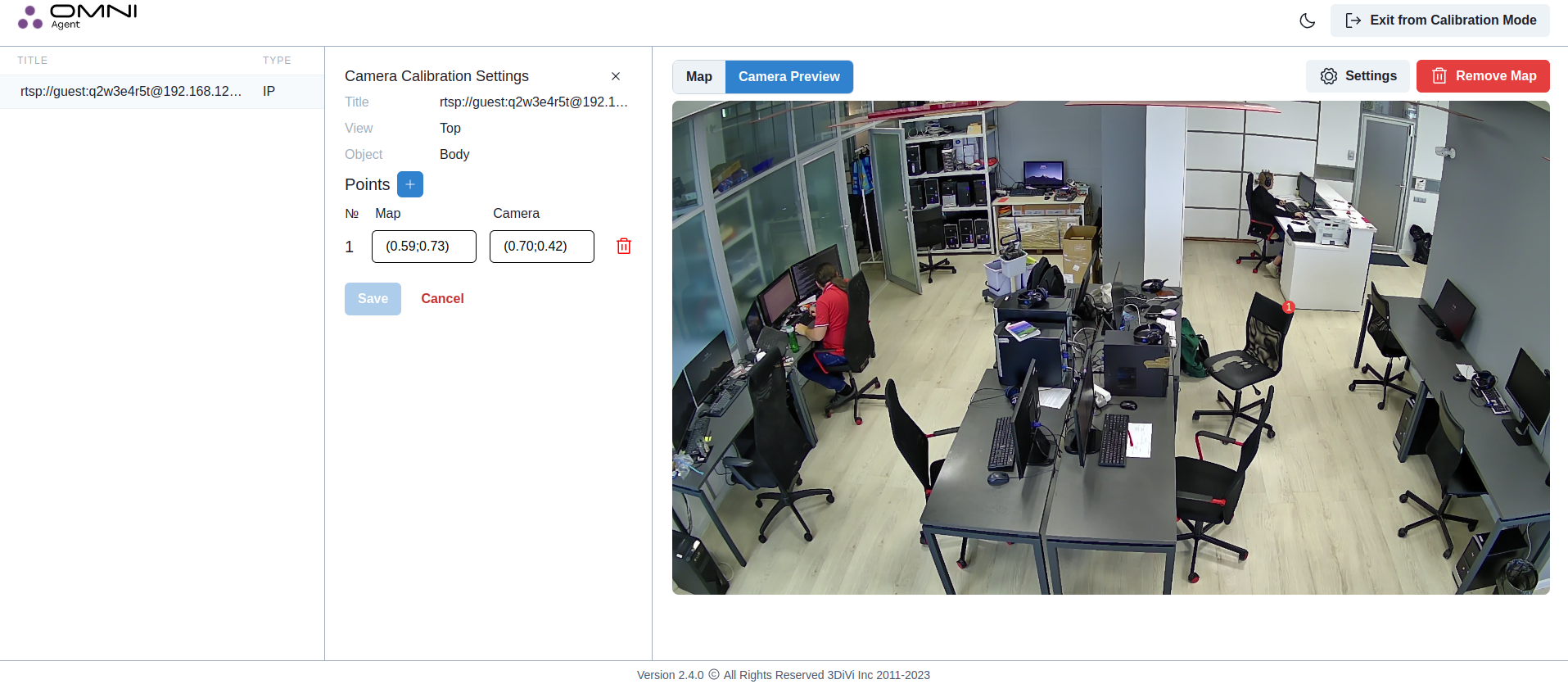
+next to the "Points" heading.In the "Map" tab, click on the location on the map where you want to set the calibration point. Then, in the "Camera Preview" tab, click on the approximate position of the same calibration point on the camera preview. As a result, points with the same serial number will appear on the map and the camera preview. The coordinates of the points will be added to the "Points" table.
- You can move (edit) the point if its position is incorrect. Just click on the point with the left mouse button and drag it to another position on the image.
- The more accurately the points match, the more accurate the calibration will be, and the more accurately the location of people will be displayed on the map.
- We reccomend to attach calibration points to the room floor and select these points at room corners and columns or doorways.
- The location of the calibration points should cover the floor surface as much as possible. If the points are very close to each other or on the same straight line, the calibration quality will be poor.
After adding the 4th pair of calibration points, click Save.
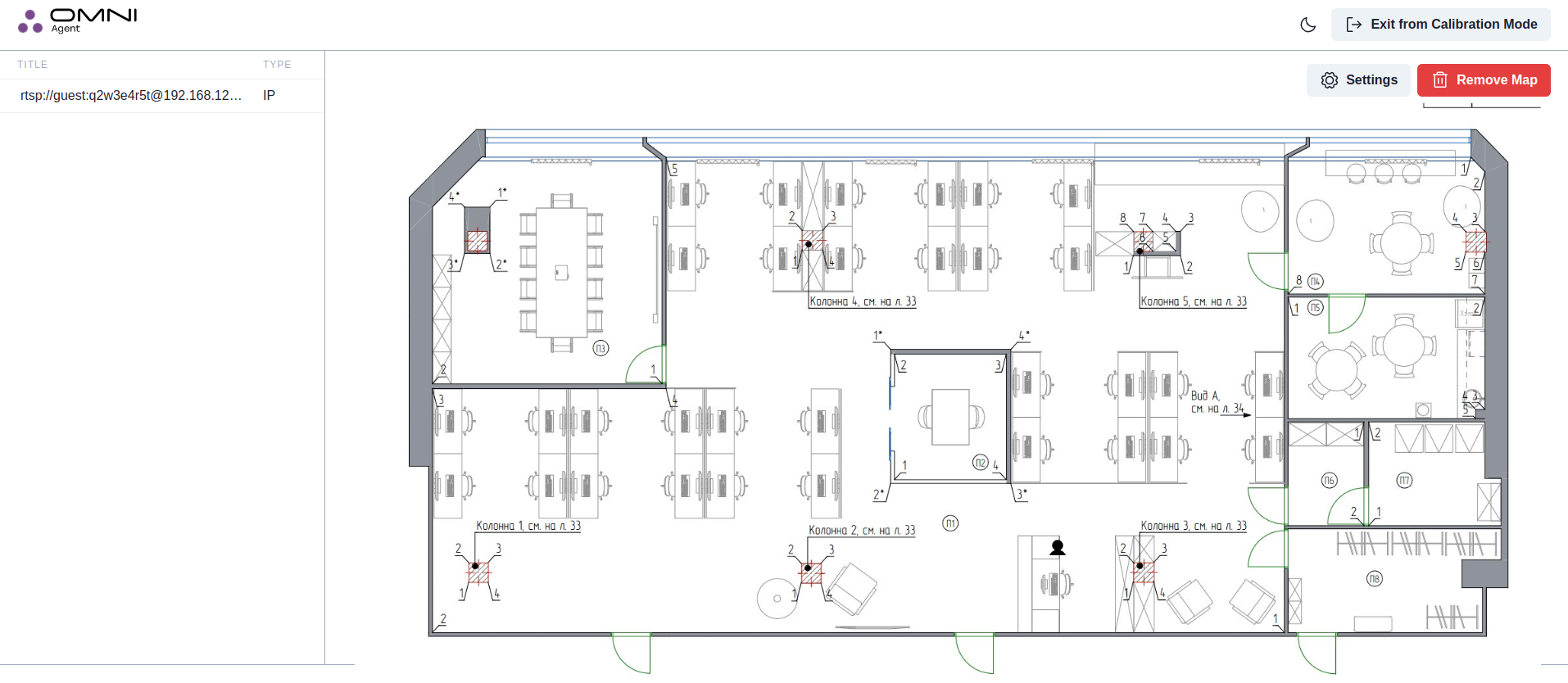
Close the "Camera Calibration Settings" tab to return to the map view.
The room map should display people location in the field of view of all calibrated cameras.
To change the confidence detection threshold and the merge object distance threshold, click on Settings and specify the values in the opened window.
- Confidence Detection Threshold: from 0 to 1, indicating the degree of confidence that the bbox contains a human body.
- Merge Object Distance Threshold: from 0 to 1. All detections within this radius are folded into one, as they are considered to belong to the same person.