Определение принадлежности лица живому человеку (3D Liveness)
В этом туториале Вы узнаете, как определить, принадлежит ли лицо на видеопотоке реальному человеку, при помощи Face SDK и RGDB-сенсора. Для удобства мы будем называть эту функцию Liveness. Как правило, liveness-проверка используется для предотвращения злонамеренных действий с использованием фото вместо реального лица.
В Face SDK есть возможность определять принадлежность лица реальному человеку посредством анализа карты глубины, либо RGB-изображения с камеры. Первый способ наиболее точный, поэтому в данном туториале мы рассмотрим только его.
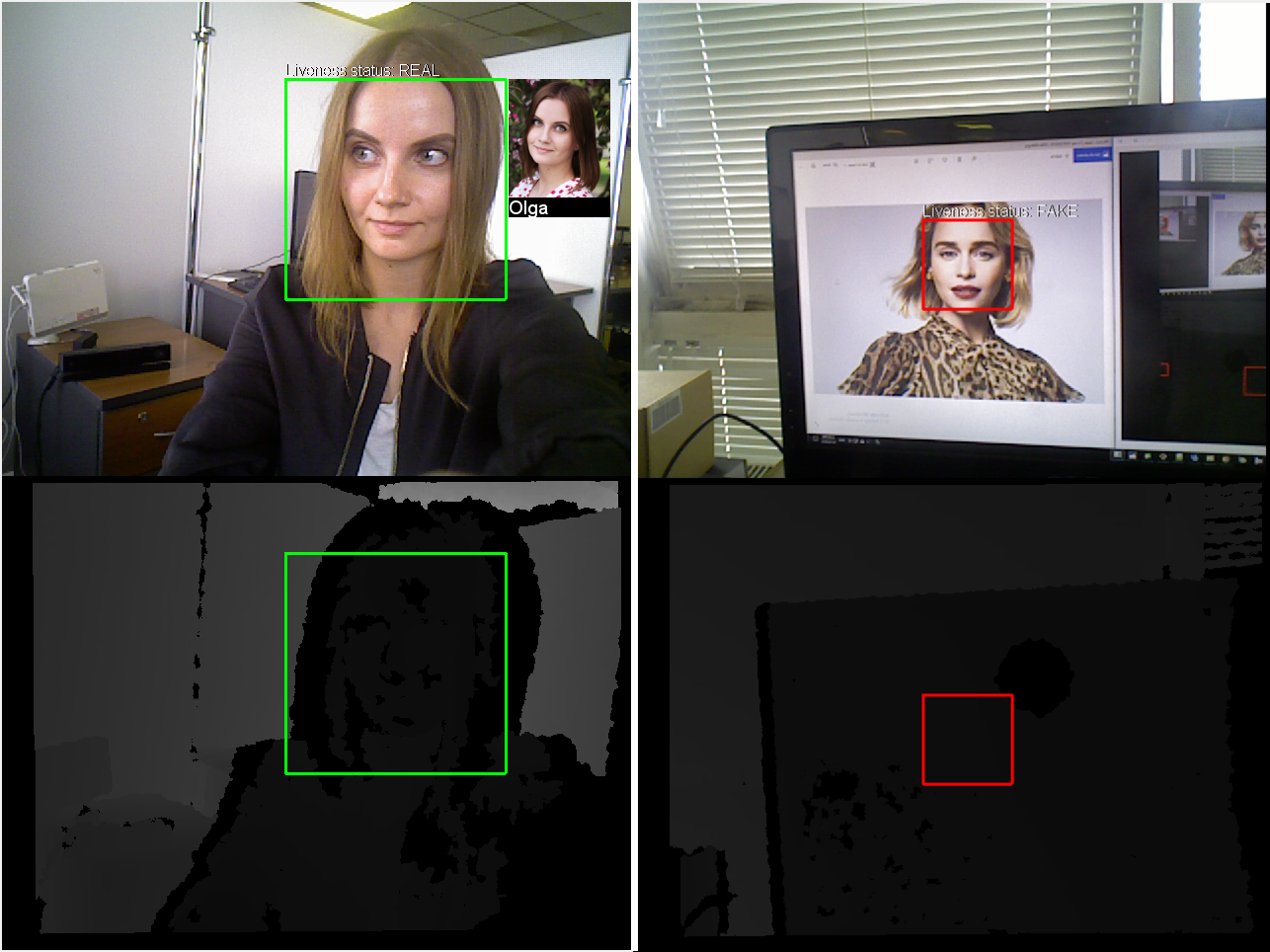
В качестве основы для данного проекта был взят туториал Распознавание лиц на видеопотоке. В данном проекте, как и в предыдущем, используется готовая база лиц для распознавания. После запуска готового проекта на экране будут отображаться цветное изображение и карта глубины, при помощи которой Вы сможете скорректировать свое положение относительно сенсора: для корректной работы liveness-детектора требуется, чтобы лицо находилось на достаточном расстоянии от сенсора, при этом качество карты глубины с сенсора должно быть приемлемым. На цветном изображении задетектированное и распознанное лицо будет выделяться зеленым прямоугольником, рядом с ним будет отображаться фото и имя из базы, а также liveness-статус REAL. В случае, если человек не распознан, liveness-статус будет REAL, но ограничивающий прямоугольник будет красным. Если перед камерой будет лицо с изображения или видео, то прямоугольник будет красным и распознавание не будет производиться, в этом случае liveness-статус будет FAKE.
Помимо Face SDK и Qt для данного проекта Вам потребуется:
- RGBD-камера с поддержкой OpenNI2 или RealSense2 (например, ASUS Xtion или RealSense D415);
- дистрибутив OpenNI2 или RealSense2.
Готовый демо-проект вы можете найти в Face SDK: examples/tutorials/depth_liveness_in_face_recognition
Подключение библиотек OpenNI2 и RealSense2
- Прежде всего, нам нужно подключить необходимые библиотеки для работы с камерой глубины. Вы можете использовать как OpenNI2-камеру (например, ASUS Xtion) так и камеру RealSense2. В зависимости от используемой камеры, Вам нужно прописать условие
WITH_OPENNI2=1илиWITH_REALSENSE=1.
face_recognition_with_video_worker.pro
...
WITH_OPENNI2=1
#WITH_REALSENSE=1
isEmpty(WITH_OPENNI2): isEmpty(WITH_REALSENSE) {
error("OpenNI2 or RealSense support should be enabled")
}
!isEmpty(WITH_OPENNI2): !isEmpty(WITH_REALSENSE) {
error("OpenNI2 and RealSense support can't be enabled simultaneously")
}
...
- [Для камер OpenNI2] Указываем путь до дистрибутива OpenNI2 и пути, по которым можно найти необходимые OpenNI2-библиотеки и заголовочные файлы.
Примечание: Для Windows необходимо выполнить установку дистрибутива и указать путь до директории установки. Для Linux достаточно указать путь до распакованного дистрибутива.
face_recognition_with_video_worker.pro
...
!isEmpty(WITH_OPENNI2){
OpenniDistr =
isEmpty(OpenniDistr) {
error("Empty path to OpenNI2 directory")
}
LIBS += -L$$OpenniDistr/Redist/
win32: LIBS += -L$$OpenniDistr/Lib/
INCLUDEPATH += = $$OpenniDistr/Include/
LIBS += -lOpenNI2
DEFINES += WITH_OPENNI2
}
...
- [Для камер RealSense2] Указываем путь до дистрибутива RealSense2 и пути, по которым можно найти необходимые RealSense2-библиотеки и заголовочные файлы. В блоке win32 определяется битность платформы для формирования корректных путей до библиотек RealSense.
Примечание: Для Windows необходимо выполнить установку дистрибутива и указать путь до директории установки. Для Linux необходимо выполнить установку дистрибутива, как указано на сайте Intel RealSense. Пути до дистрибутива в pro-файле указывать не требуется.
face_recognition_with_video_worker.pro
...
!isEmpty(WITH_REALSENSE){
win32 {
RealSenseDistr = /home/stranger/depth_liveness/librealsense/install
isEmpty(RealSenseDistr) {
error("Empty path to RealSense directory")
}
contains(QMAKE_TARGET.arch, x86_64) {
LIBS += -L$$RealSenseDistr/lib/x64
LIBS += -L$$RealSenseDistr/bin/x64
} else {
LIBS += -L$$RealSenseDistr/lib/x86
LIBS += -L$$RealSenseDistr/bin/x86
}
INCLUDEPATH += $$RealSenseDistr/include/
}
LIBS += -lrealsense2
DEFINES += WITH_REALSENSE
}
...
Получение карты глубины через OpenNI2 API или RealSense2 API
- На данном этапе нам необходимо получить кадры глубины с RGBD-камеры при помощи OpenNI2 API или RealSense2 API, в зависимости от используемой камеры. В данном проекте мы не будем подробно рассматривать получение кадров глубины. Мы используем заголовочные файлы, которые входят в состав одной из демо-программ Face SDK (video_recognition_demo). В pro-файле проекта указываем путь до папки examples/cpp/video_recognition_demo/src, которая находится в Face SDK.
face_recognition_with_video_worker.pro
...
INCLUDEPATH += $$FACE_SDK_PATH/examples/cpp/video_recognition_demo/src
...
- Указываем необходимые заголовочные файлы для работы с камерами OpenNI2 и RealSense2. Подробную информацию о получении кадров глубины Вы можете найти в указанных файлах (
OpenniSource.hиRealSenseSource.h).
face_recognition_with_video_worker.pro
...
!isEmpty(WITH_OPENNI2){
HEADERS += OpenniSource.h
}
else {
HEADERS += RealSenseSource.h
}
...
- Для использования математических констант определяем
_USE_MATH_DEFINES(cmathподключен в файлахOpenniSource.hиRealSenseSource.h).
face_recognition_with_video_worker.pro
...
unix: LIBS += -ldl
win32: DEFINES += _USE_MATH_DEFINES
...
Подключение сенсора глубины для обработки кадров
- В предыдущих проектах мы получали изображение с веб-камеры, используя объект
QCameraCapture. Однако в этом проекте нам требуется получать не только цветные кадры, но и кадры глубины. Для этого создадим новый классDepthSensorCapture: Add New > C++ > C++ Class > Choose… > Class name – DepthSensorCapture > Base class – QObject > Next > Project Management (настройки по умолчанию) > Finish. - В файле
depthsensorcapture.hподключим заголовочный файлImageAndDepthSource.h. Также подключаемQSharedPointerдля работы с указателями,QThreadдля обработки потоков,QByteArrayдля работы с массивами байтов,memoryиatomicдля использования умных указателей и атомарных типов соответственно. В файлеdepthsensorcapture.cppподключаем заголовочные файлыOpenniSource.hиRealSenseSource.hдля получения кадров глубины, а такжеworker.hиdepthsensorcapture.h. Для обработки ошибок используетсяassert.h, для отображения сообщения об ошибке используетсяQMessageBox.
depthsensorcapture.h
#include "ImageAndDepthSource.h"
#include <QSharedPointer>
#include <QThread>
#include <QByteArray>
#include <memory>
#include <atomic>
...
depthsensorcapture.cpp
#if defined(WITH_OPENNI2)
#include "OpenniSource.h"
#elif defined(WITH_REALSENSE)
#include "RealSenseSource.h"
#endif
#include "worker.h"
#include "depthsensorcapture.h"
#include <assert.h>
#include <QMessageBox>
...
- Определяем
RGBFramePtr– указатель на цветное изображение иDepthFramePtr– указатель на кадр глубины. Конструктор классаDepthSensorCaptureпринимает родительский виджет (parent), а также указатель наworker. Данные с сенсора будут приходить в бесконечном цикле. Чтобы главный поток, в котором происходит отрисовка интерфейса, не ждал завершения цикла, мы создаем отдельный поток и перемещаем в него объектDepthSensorCapture.
depthsensorcapture.h
...
class Worker;
class DepthSensorCapture : public QObject
{
Q_OBJECT
public:
typedef std::shared_ptr<QImage> FramePtr;
typedef std::shared_ptr<QByteArray> DepthPtr;
explicit DepthSensorCapture(
QWidget* parent,
std::shared_ptr<Worker> worker);
}
...
depthsensorcapture.cpp
...
DepthSensorCapture::DepthSensorCapture(
QWidget* parent,
std::shared_ptr<Worker> worker) :
_parent(parent),
_worker(worker)
{
#if defined(WITH_OPENNI2)
depth_source.reset(new OpenniSource());
#else
depth_source.reset(new RealSenseSource());
#endif
thread.reset(new QThread());
this->moveToThread(thread.data());
connect(thread.data(), &QThread::started, this, &DepthSensorCapture::frameUpdatedThread);
}
...
- В методе
DepthSensorCapture::startзапускаем поток получения данных, в методеDepthSensorCapture::stopостанавливаем его.
depthsensorcapture.h
...
class DepthSensorCapture : public QObject
{
...
void start();
void stop();
}
...
depthsensorcapture.cpp
...
void DepthSensorCapture::start()
{
if (!thread->isRunning())
{
thread->start();
}
}
void DepthSensorCapture::stop()
{
if (thread->isRunning())
{
shutdown = true;
thread->quit();
thread->wait();
}
}
...
- В методе
DepthSensorCapture::frameUpdatedThreadобрабатываем новый кадр с камеры в бесконечном цикле и передаем его вWorkerчерезaddFrame. В случае возникновения ошибки появится окно с сообщением об ошибке.
depthsensorcapture.h
...
class DepthSensorCapture : public QObject
{
...
signals:
void newFrameAvailable();
private
void frameUpdatedThread();
private:
QWidget* _parent;
std::shared_ptr<Worker> _worker;
QSharedPointer<QThread> thread;
QSharedPointer<ImageAndDepthSource> depth_source;
std::atomic<bool> shutdown = {false};
};
...
depthsensorcapture.cpp
...
void DepthSensorCapture::frameUpdatedThread()
{
while(!shutdown)
{
try
{
ImageAndDepth data;
depth_source->get(data);
_worker->addFrame(data);
emit newFrameAvailable();
}
catch(std::exception& ex)
{
stop();
QMessageBox::critical(
_parent,
tr("Face SDK error"),
ex.what());
break;
}
}
}
...
- Объект
VideoFrameдолжен содержать в себе RGB кадр с камеры.
depthsensorcapture.cpp
...
Database::Database(...)
{
...
VideoFrame frame;
frame.frame() = DepthSensorCapture::RGBFramePtr(new QImage(image));
...
}
...
- В файле
videoframe.hподключаем заголовочный файлdepthsensorcapture.hдля работы с камерой глубины.
videoframe.h
#include "depthsensorcapture.h"
...
- Интефейс
IRawImageпозволяет получить указатель на данные изображения, его формат, высоту и ширину.
videoframe.h
...
class VideoFrame : public pbio::IRawImage
{
public:
VideoFrame(){}
...
DepthSensorCapture::RGBFramePtr& frame();
const DepthSensorCapture::RGBFramePtr& frame() const;
private:
DepthSensorCapture::RGBFramePtr _frame;
}
...
inline
DepthSensorCapture::RGBFramePtr& VideoFrame::frame()
{
return _frame;
}
inline
const DepthSensorCapture::RGBFramePtr& VideoFrame::frame() const
{
return _frame;
}
...
- В методе
runProcessingзапускаем камеру, в методеstopProcessing– останавливаем.
viewwindow.h
...
class ViewWindow : public QWidget
{
...
private:
Ui::ViewWindow *ui;
QScopedPointer<DepthSensorCapture> _camera;
...
}
...
viewwindow.cpp
#include "depthsensorcapture.h"
ViewWindow::ViewWindow(...)
{
...
_camera.reset(new DepthSensorCapture(
this,
_worker));
connect(_camera.data(), &DepthSensorCapture::newFrameAvailable, this, &ViewWindow::draw);
}
void ViewWindow::stopProcessing()
{
if (!_running)
return;
_camera->stop();
_running = false;
}
void ViewWindow::runProcessing()
{
if (_running)
return;
_camera->start();
_running = true;
}
...
- В файле
worker.hподключаем заголовочный файлdepthsensorcapture.h. СтруктураSharedImageAndDepthсодержит в себе указатели на RGB-кадр и кадр глубины с камеры, а также структуруpbio::DepthMapRawс информацией о параметрах карты глубины (ширина, высота и т.д.). Указатели используются вWorker. Из-за некоторой задержки в обработке кадров определенное количество кадров будет складываться в очередь на отрисовку, поэтому для экономии памяти вместо самих кадров мы храним указатели на них.
worker.h
#include "depthsensorcapture.h"
struct SharedImageAndDepth
{
DepthSensorCapture::RGBFramePtr color_image;
DepthSensorCapture::DepthFramePtr depth_image;
pbio::DepthMapRaw depth_options;
};
...
- В структуру
DrawingDataпередаемSharedImageAndDepth frame- кадры для отрисовки (цветное изображение и карта глубины). В коллбэкеTrackingCallbackиз очереди кадров извлекается изображение, соответствующее последнему полученному результату.
worker.h
...
class Worker
{
...
struct DrawingData
{
...
SharedImageAndDepth frame;
}
void addFrame(const ImageAndDepth& frame);
private:
DrawingData _drawing_data;
std::mutex _drawing_data_mutex;
std::queue<std::pair<int, SharedImageAndDepth> > _frames;
...
}
...
worker.cpp
...
void Worker::TrackingCallback(
const pbio::VideoWorker::TrackingCallbackData &data,
void * const userdata)
{
...
// Get the frame with frame_id
SharedImageAndDepth frame;
{
...
}
}
void Worker::addFrame(const ImageAndDepth& data)
{
...
}
...
Обработка карты глубины при помощи VideoWorker
- В конструкторе
Worker::Workerпереопределяем значения некоторых параметров объектаVideoWorkerдля обработки карты глубины. а именно:
depth_data_flag("1"– включен режим работы с кадрами глубины для подтверждения liveness);weak_tracks_in_tracking_callback(“1”– вTrackingCallbackпередаются все сэмплы, в том числе сэмплы с флагомweak = true).
Значение флага weak становится true в том случае, если сэмпл не прошел определенные проверки, например, если:
- на лице слишком много теней (недостаточное освещение);
- изображение нечеткое (размытое);
- лицо находится под большим углом;
- размер лица в кадре слишком маленький;
- лицо не прошло liveness-проверку (взято с фото).
Более подробное описание требований к условиям освещения, размещения камер и т.д. Вы можете найти в пункте Рекомендации по камерам. Как правило, сэмплы, которые не прошли проверку, не передаются для дальнейшей обработки. Однако в данном проекте даже лица на фото (не прошедшие liveness-проверку) должны выделяться ограничивающим прямоугольником, следовательно, мы должны передавать в TrackingCallback в том числе сэмплы с флагом weak = true.
worker.cpp
...
Worker::Worker(...)
{
...
vwconfig.overrideParameter("depth_data_flag", 1);
vwconfig.overrideParameter("weak_tracks_in_tracking_callback", 1);
...
}
...
- В файле
worker.hв структуреFaceDataуказываем перечислениеpbio::DepthLivenessEstimator- результат определения принадлежности лица живому человеку. Доступно четыре варианта определения liveness:
- NOT_ENOUGH_DATA – недостаточно информации. Такая ситуация может возникнуть, если качество карты глубины неудовлетворительное, либо пользователь находится слишком близко/слишком далеко от сенсора.
- REAL – лицо принадлежит реальному человеку.
- FAKE – лицо было взято с фото/видео.
- NOT_COMPUTED – лицо не было проверено. Такая ситуация может возникнуть, например, если кадры с сенсора не синхронизированы (цветной кадр получен, но соответствующий ему кадр глубины не найден в определенном временном диапазоне).
Результат liveness-проверки сохраняется в переменную face.liveness_status для дальнейшей отрисовки.
worker.h
...
class Worker
{
public:
// Face data
struct FaceData
{
...
pbio::DepthLivenessEstimator::Liveness liveness_status;
}
...
}
...
worker.cpp
...
void Worker::TrackingCallback(...)
{
...
{
...
// Update the information
{
const std::lock_guard<std::mutex> guard(worker._drawing_data_mutex);
...
// Samples
for(size_t i = 0; i < samples.size(); ++i)
{
...
face.liveness_status = data.samples_depth_liveness_confirmed[i];
}
}
}
...
}
...
- В методе
Worker::addFrameподаем последний кадр глубины в FaceSDK через методVideoWorker::addDepthFrameи сохраняем его для дальнейшей отрисовки.
worker.h
...
class Worker
{
...
private:
...
DepthSensorCapture::DepthFramePtr _last_depth_image;
pbio::DepthMapRaw _last_depth_options;
...
}
...
worker.cpp
...
void Worker::addFrame(const ImageAndDepth& data)
{
...
const int stream_id = 0;
SharedImageAndDepth frame;
if (!data.depth_image.empty())
{
const pbio::DepthMapRaw& depth_options = data.make_dmr();
_video_worker->addDepthFrame(
depth_options,
stream_id,
data.depth_timestamp_microsec);
_last_depth_image = std::make_shared<QByteArray>(
(const char*)data.depth_image.data(),
depth_options.depth_data_stride_in_bytes * depth_options.depth_map_rows);
_last_depth_options = depth_options;
frame.depth_image = _last_depth_image;
frame.depth_options = depth_options;
}
}
...
- Подготавливаем и подаем в FaceSDK цветное изображение через метод
VideoWorker::addVideoFrame. В случае, если формат полученного цветного изображения – не RGB, а BGR, порядок байтов меняется, чтобы цвета отображались корректно. Если вместе с цветным кадром не пришел кадр глубины, используется последний полученный кадр глубины. Пара из кадра глубины и цветного изображения сохраняется в очередь_frames, чтобы в коллбэкеTrackingCallbackнайти данные, соответствующие результату обработки.
worker.cpp
...
void Worker::addFrame(const ImageAndDepth& data)
{
...
if (!data.color_image.empty())
{
QImage image(
(const uchar*)data.color_image.data(),
data.color_width,
data.color_height,
data.color_stride_in_bytes,
QImage::Format_RGB888);
if (data.color_format != pbio::IRawImage::FORMAT_RGB)
{
image = image.rgbSwapped();
}
frame.color_image = std::make_shared<QImage>(image);
VideoFrame video_frame;
video_frame.frame() = frame.color_image;
const std::lock_guard<std::mutex> guard(_frames_mutex);
const int frame_id = _video_worker->addVideoFrame(
video_frame,
stream_id,
data.image_timestamp_microsec);
if (data.depth_image.empty())
{
frame.depth_image = _last_depth_image;
frame.depth_options = _last_depth_options;
}
_frames.push(std::make_pair(frame_id, frame));
}
_video_worker->checkExceptions();
}
...
Визуализация RGB и карты глубины. Отображение информации о 3D Liveness
- Модифицируем метод рисования
DrawFunction::Drawв файлеdrawfunction.cpp. В полеframeструктурыWorker::DrawingDataсодержатся указатели на данные цветного изображения и карты глубины, а также параметры кадра глубины (ширина, высота и др.). Для удобства обращения к этим данным заведем на них ссылкиconst QImage& color_image,const QByteArray& depth_arrayиconst pbio::DepthMapRaw& depth_options. Цветное изображение и карта глубины будут отображаться наQImage result, который представляет собой своего рода “фон” и включает в себя оба изображения (цветное – сверху, карта глубины – снизу). Перед этим нам необходимо конвертировать 16-битные значения глубины в 8-битные для корректного отображения карты глубины (в серых тонах). В переменнойmax_depth_mmуказываем максимальное расстояние от сенсора до пользователя (как правило, для RGBD-камер это 10 метров).
drawfunction.cpp
...
// static
QImage DrawFunction::Draw(
const Worker::DrawingData &data,
const Database &database)
{
const QImage& color_image = *data.frame.color_image;
const QByteArray& depth_array = *data.frame.depth_image;
const pbio::DepthMapRaw& depth_options = data.frame.depth_options;
QByteArray depth8_array;
const uint16_t* depth_ptr = (const uint16_t*)depth_array.constData();
const size_t elements_count_in_row = depth_options.depth_data_stride_in_bytes / sizeof(uint16_t);
const size_t elements_count = depth_options.depth_map_rows * elements_count_in_row;
const float max_depth_mm = 10000.f;
for(size_t i = 0; i < elements_count; ++i)
{
const uint16_t depth_mm = depth_ptr[i] * depth_options.depth_unit_in_millimeters;
const uint8_t depth_8bit = std::min<int>(255, depth_mm / max_depth_mm * 255 + 0.5);
depth8_array += depth_8bit;
}
...
}
...
- Из сконвертированных значений формируем изображение глубины. Создаем объект
result, на котором будет отображаться цветное изображение (в верхней части) и карта глубины (в нижней части). Рисуем эти изображения.
drawfunction.cpp
...
QImage DrawFunction::Draw(...)
{
...
QImage depth_image(
(const uchar*)depth8_array.constData(),
depth_options.depth_map_cols,
depth_options.depth_map_rows,
elements_count_in_row,
QImage::Format_Grayscale8);
QImage result(
QSize(std::max<int>(color_image.width(), depth_image.width()),
color_image.height() + depth_image.height()),
QImage::Format_RGB888);
QPainter painter(&result);
painter.drawImage(QPoint(0, 0), color_image);
painter.drawImage(QPoint(0, color_image.height()), depth_image);
...
}
...
- Отображаем liveness-статус рядом с лицом, в зависимости от информации, полученной от liveness-детектора. Зададим параметры надписи (цвет, линия, размер). На карте глубины будет отображаться ограничивающий прямоугольник, чтобы Вы могли убедиться, что кадр глубины не смещен относительно цветного кадра.
drawfunction.cpp
...
QImage DrawFunction::Draw(...)
{
...
for(const auto &face_data : faces_data)
{
...
if(face.frame_id == data.frame_id && !face.lost)
{
...
// Draw the bounding box
pen.setWidth(3);
pen.setColor(color);
painter.setPen(pen);
painter.drawRect(rect);
if (!depth_image.size().isEmpty())
{
const QRect rect_on_depth(
bounding_box.x, bounding_box.y + color_image.height(),
bounding_box.width, bounding_box.height);
painter.drawRect(rect_on_depth);
QString liveness_str = "Liveness status: ";
switch(face.liveness_status)
{
case pbio::DepthLivenessEstimator::NOT_ENOUGH_DATA:
liveness_str += "NOT ENOUGH DATA";
break;
case pbio::DepthLivenessEstimator::REAL:
liveness_str += "REAL";
break;
case pbio::DepthLivenessEstimator::FAKE:
liveness_str += "FAKE";
break;
default:
liveness_str += "NOT COMPUTED";
}
const int font_size = 12;
painter.setFont(QFont("Arial", font_size, QFont::Medium));
pen.setColor(Qt::black);
painter.setPen(pen);
painter.drawText(rect.topLeft() + QPoint(1, -pen.width()), liveness_str);
pen.setColor(Qt::white);
painter.setPen(pen);
painter.drawText(rect.topLeft() + QPoint(0, -pen.width()), liveness_str);
}
...
}
...
}
...
}
...
- Запускаем проект. На экране будут отображаться цветное изображение с камеры и карта глубины. На цветном изображении будет отображаться информация о найденном лице:
- статус распознавания (цвет ограничивающего прямоугольника: зеленый - пользователь есть в базе, красный - нет в базе/лицо с изображения или видео);
- информация о распознанном пользователе (его фотография из базы и имя);
- liveness-статус: real - реальный человек, fake - лицо взято с фото или видео, not_enough_data - качество карты глубины неудовлетворительное/пользователь слишком близко или далеко от сенсора, not_computed - рассинхронизация кадра глубины и цветного кадра.